Master Thesis · RSS 2020
Improving robot grasping under uncertainty with deep RL
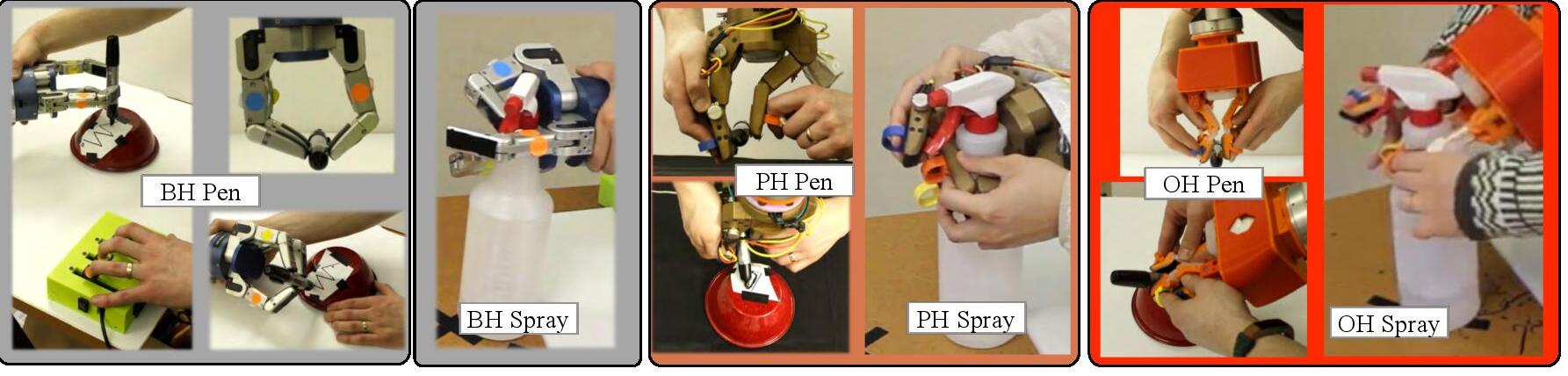
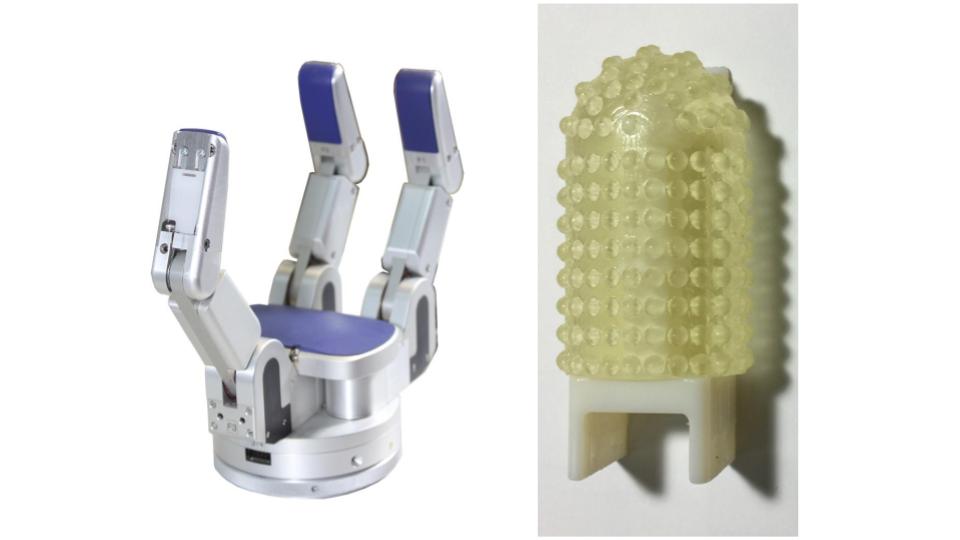
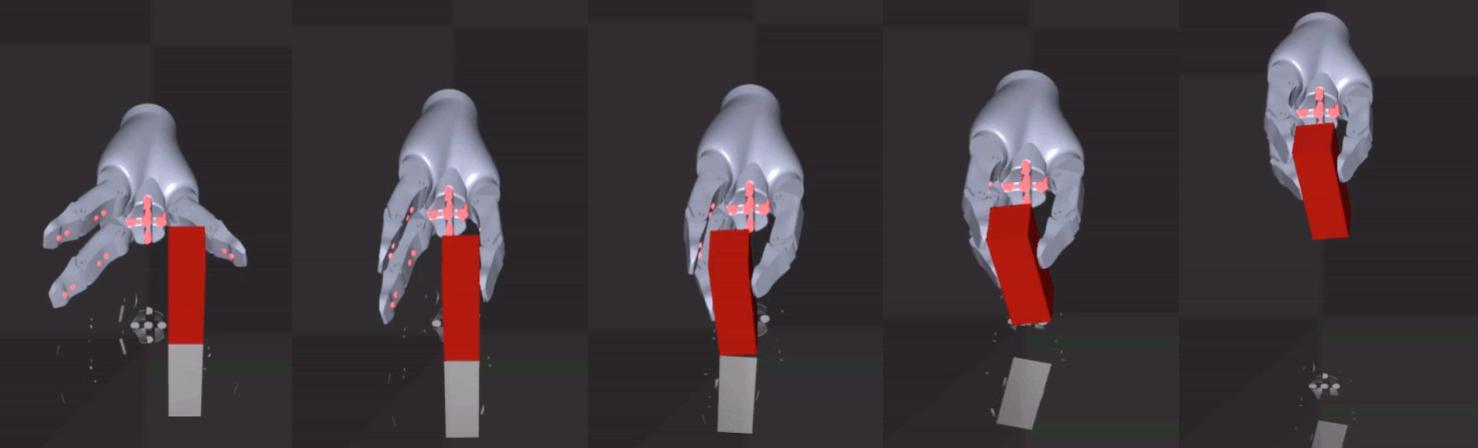
From prior human studies, we knew humans massively out-grasp robots when objects are in noisy in-hand positions. I took one of the human-adapted strategies as expert demonstration and applied DDPG to teach a robot hand to grasp varied basic objects from randomized in-hand poses. Single-object expert demonstration plus pretraining accelerated the learning pipeline.